10 Signal
这篇笔记介绍lecture16、17中的内容。
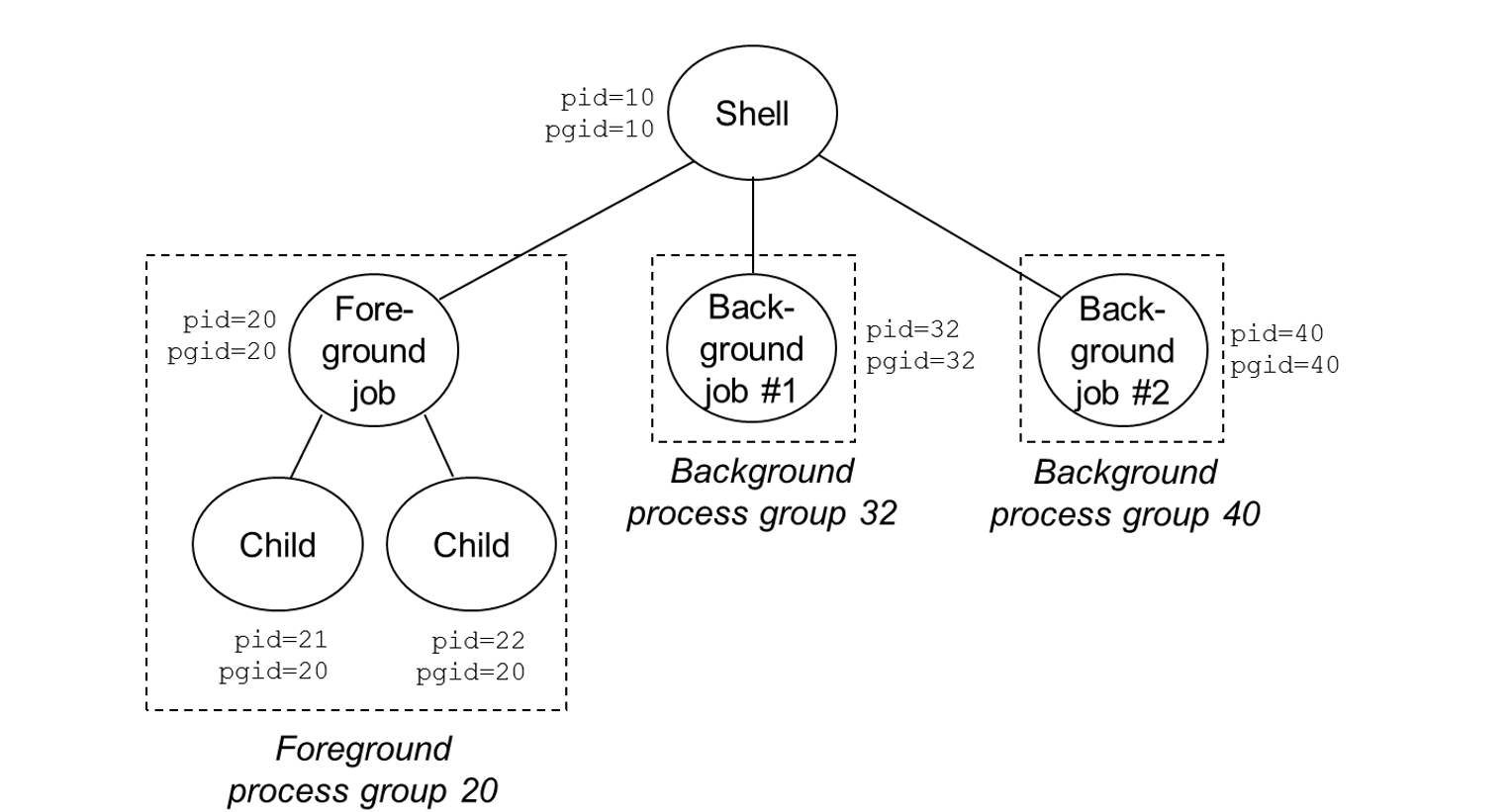
进程组
每个进程都属于且仅属于一个进程组。进程组编号由一个正整数(process group ID)标记。默认情况下,子进程与父进程有相同的进程组。
// return process group PID
pid_t getpgrp(void);
getpgrp() 函数获取进程的进程组PID。
// return 0 on success, -1 on error
pid_t setpgid(pid_t pid, pid_t pgid);
setpgid() 函数更改 pid 进程的进程组PID为 pgid 。如果 pid 为0,则使用当前进程的PID;如果 pgid 为0,则由 pid 指定的进程PID为 pgid 。
作业(job)是unix shell使用的抽象,用于表示进程,作为评估单个命令行的结果而创建的进程。任何时候最多有一个前台作业和零或多个后台作业。shell会为每个作业创建一个单独的进程组(进程组ID通常取自作业中一个父进程)。
信号
信号是一种消息,通知操作系统某种类型的事件发生。这里的类型对应某种系统事件。系统事件分为硬件事件和软件事件。
要将信号传递给目标进程,需要发送信号、接受信号两个步骤。
通过更新目标进程上下文中的某些state,内核向目标进程发送信号。有两种情况会导致发送信号:内核检测到系统事件,或进程调用了一个 kill 函数。
// pid - receiver process, sig - signal
// 0 if OK, -1 on error
int kill(pid_t pid, int sig);
内核会迫使目标进程对信号做出反应。进程可以忽略信号、终止,或者通过一个用户级别的名为信号处理器的程序捕获信号。
待处理信号(pending signal)指已发送但尚未接收的信号。任何时候,每个类型最多只有一个待处理信号。如果某个进程已经有了类型k的待处理信号,接下来发送到进程的类型k信号会被简单地丢弃。
进程可以选择性地阻止某些信号。被阻止的信号可以发送到目标进程,但在阻塞解除之前,这些待处理信号不会被接受。
对于每个进程,内核在待处理位向量(pending bit vector)中维护待处理信号,在阻塞位向量(blocked bit vector)中维护阻塞信号。在发送类型k的信号时,内核设置类型k的位;在接受类型k的信号时,内核清除类型k的位。
发送信号
对于 kill() 函数,如果 pid 大于0,函数向 pid 进程发送信号;否则,向进程组 abs(pid) 发送信号。
int main()
{
pid_t pid;
/* child sleeps until SIGKILL signal received */
if ((pid = Fork()) == 0) {
Pause(); /* wait for a signal to arrive */
printf("control should never reach here!\n");
exit(0);
}
/* parent sends a SIGKILL signal to a child */
Kill(pid, SIGKILL);
exit(0);
}
kill() 可以向进程组发送信号。将参数 pid 改为 -pid ,会将信号发送到PID进程组中的每个进程。
除了 kill() 之外,还有其它方式发送信号,如 alarm() 函数。
// return the remaining secs of last alarm, or 0 if no previous alarm
unsigned int alarm(unsigned int secs);
alarm() 函数安排内核在 secs 秒后向调用进程发送SIGALRM信号。如果 secs 为0,则不产生新的闹钟。这个函数会取消任何待处理闹钟,返回待处理闹钟的剩余秒数。
还可以通过键盘发送信号。CTRL-c会让内核向shell发送SIGINT信号。shell接收这个信号,然后向前台所有进程组中的所有进程发送SIGINT,默认终止前台作业。CTRL-z会让内核向shell��发送SIGTSTP信号,shell接收并向前台所有进程组发SIGTSTP,默认停止(挂起)前台作业。
接收信号
接收信号的先决条件是内核准备将控制交给进程。
接收信号时,内核检查检查未阻塞的待处理信号集合。如果这个集合为空,内核将控制权交给进程的下一个指令;如果集合非空,内核选择集合中某个信号k(通常为最小k)并强制进程接收信号k。信号的接收触发进程的某些动作。进程完成动作后,控制到达进程的下一个指令。
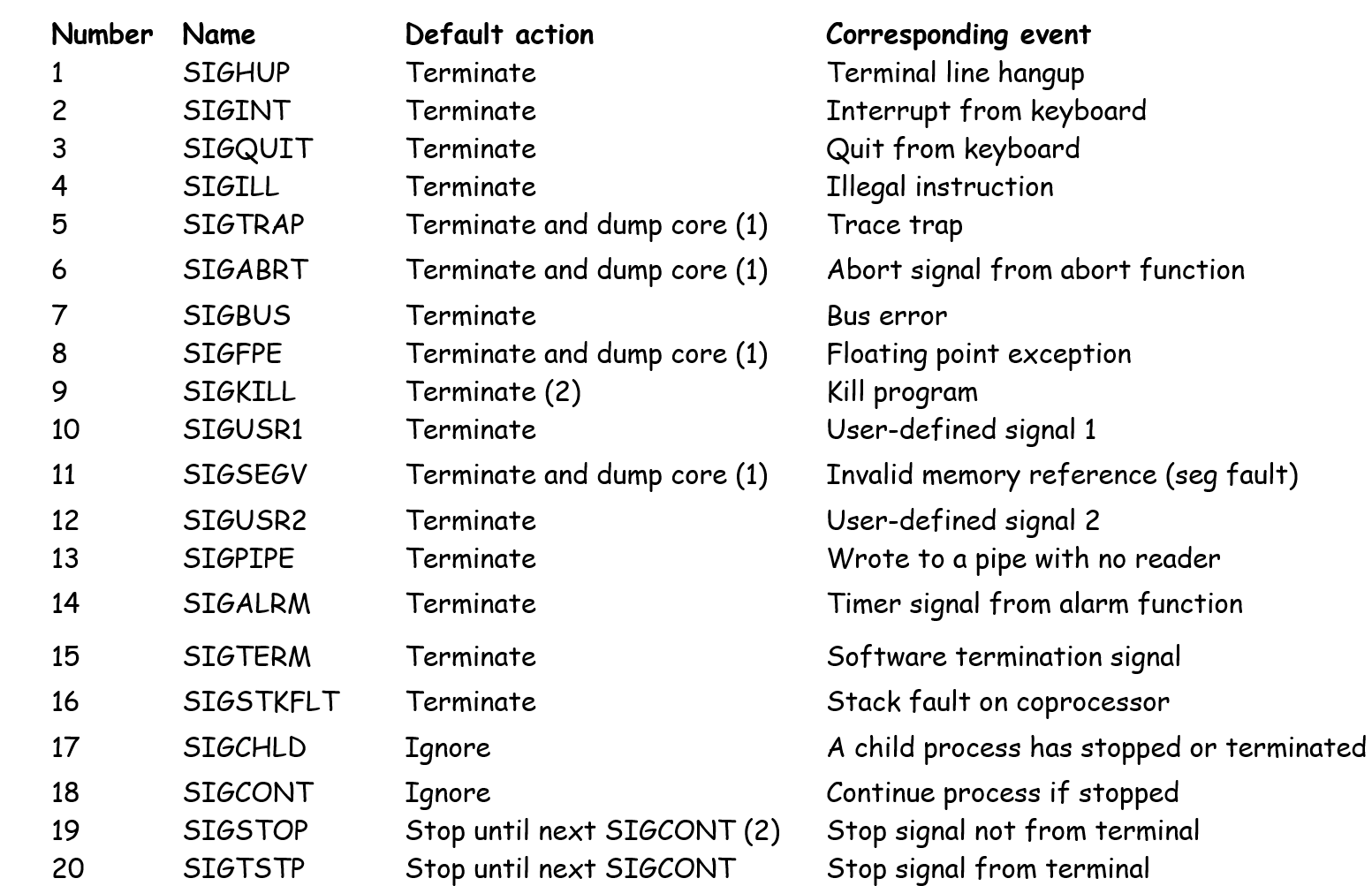
每个信号类型都有一个预定义的默认动作,例如终止、停止、被忽略等等。SIGKILL信号的默认动作是终止进程,SIGCHLD信号的默认动作是忽略信号。通过 signal() 函数,进程可以改变信号的默认动作。SIGKILL和SIGCHLD的默认动作无法改变。
typedef void handler_t(int);
handler_t *signal(int signum, handler_t *handler);
如果 handler 为SIG_IGN, signum 类型的信号会被忽略;如果 handler 为SIG_DFL, signum 类型的信号恢复到默认动作;否则将 signum 类型的动作改变为 handler 。
实际使用时,程序会先设置 handler 的行为,通过 signal 函数的调用接收信号,通过它的执行处理信号。
void handler(int sig) /* SIGINT handler */
{
printf("Caught SIGINT\n");
exit(0);
}
int main()
{
/* Install the SIGINT handler */
if (signal(SIGINT, handler) == SIG_ERR)
unix_error("signal error");
pause(); /* wait for the receipt of a signal */
exit(0);
}
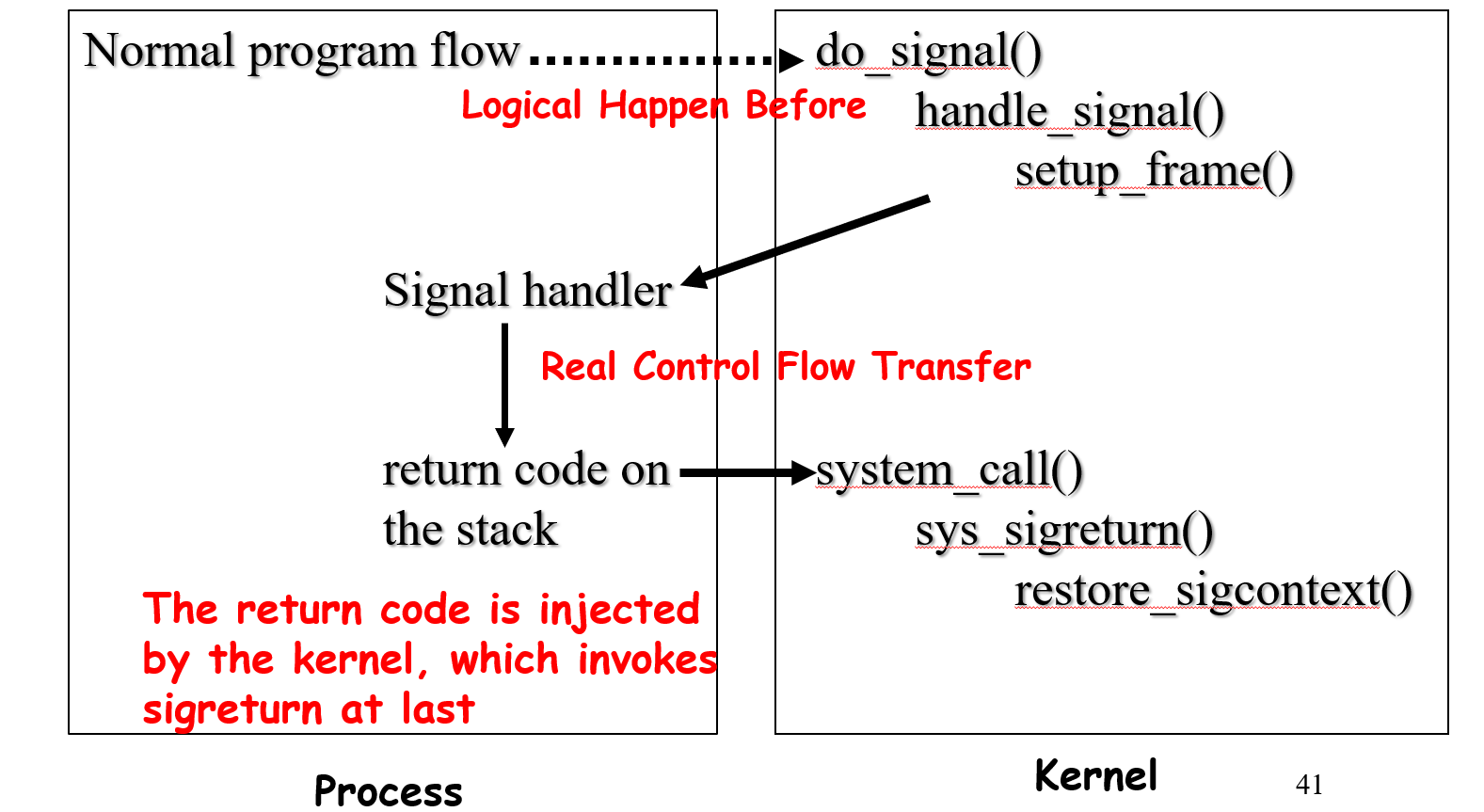
当进程捕捉到类型 k 的信号时,为这个类型设计的handler会被调用。同样的handler可以处理不同类型的信号,这种情况下类型信号会作为参数传递给handler函数(用户态)。当handler执行返回语句的时候,控制通常会回到之前的部分(被接收信号打断的部分,内核调用),也有可能由于错误立即返回。只有函数执行结束回到内核态,才会将待处理位向量中的值清除。
阻塞与取消阻塞信号
在执行signal handler时,还可能收到�其它的信号。
内核态会隐式地阻塞信号,即阻塞任何正在被handler处理的同类型信号。通过 sigprocmask 系列函数可以显示地处理信号。
#include<signal.h>
int sigprocmask(int how, const sigset_t *set, sigset_t *oldset)
这个函数可以设�置被阻塞信号的集合。参数 how 为SIG_BLOCK时,将 set 添加到被阻塞的集合;为SIG_UNBLOCK时,将 set 从被阻塞集合移除;为SIG_SETMASK时,直接将被阻塞集合设置为 set 。如果 old_set 非空,先前被阻塞的集合存储在 old_set 中。
除了 sigprocmask 外还有一些其它的函数,用于设置 set。
int sigemptyset(sigset_t *set);
int sigefillset(sigset_t *set);
int sigaddset(sigset_t *set, int signum);
int sigdelset(sigset_t *set, int signum);
// return 0 if OK, -1 on error
int sigismember(const sigset_t *set, int signum);
// 1 if member, 0 if not, -1 on error
并行错误
指导原则
有一些方法可以尽可能减少并行错误。
- 让信号handler尽量简单,比如设置一个值就直接返回。可以让相关的函数周期性检查这个值。
- 只使用异步信号安全的函数(
printf、sprintf、malloc、exit都不符合要求),这些函数的中断不会干扰操作。CSAPP库中有相关的函数替代这些函数的功能(write、_exit是安全的)。 - 有些函数可能改变错误码。在产生错误码时要及时保存(防止被覆盖或产生其它问题)。
- 通过阻塞所有信号来保护对共享全局数据的访问。
- 用
volatile声明全局变量,不要将其放入寄存器。volatile会保证变量存放在一个稳定的地址。 - 用
sig_automic_t声明标志,保证原子操作。flag++或flag += 10等操作是复合操作。
信号处理语义
read 、 write 、 wait 、 accept 等是慢系统调用,可能会潜在地阻塞系统很长时间;一些旧的Unix系统会在某种信号被捕获后将它的动作恢复为默认值,或者在慢系统调用中,被中断后不会回到中断的位置,而是立即返回给用户。
自旋循环
当线程尝试获取被占用的锁时,它会在循环中不断检查锁的状态,直到锁变为可用。
volatile sig_atomic_t pid;
void sigchld_handler(int s)
{
int olderrno = errno;
pid = waitpid(-1, NULL, 0);
errno = olderrno;
}
void sigint_handler(int s) {}
int main(int argc, char **argv)
{
sigset_t mask, prev;
Signal(SIGCHLD, sigchld_handler);
Signal(SIGINT, sigint_handler);
Sigemptyset(&mask);
Sigaddset(&mask, SIGCHLD);
while (1) {
Sigprocmask(SIG_BLOCK, &mask, &prev); /* Block SIGCHLD */
if (Fork() == 0) /* Child */
exit(0);
/* Parent */
pid = 0;
Sigprocmask(SIG_SETMASK, &prev, NULL);/* Unblock SIGCHLD */
/* Wait for SIGCHLD to be received (wasteful) */
while (!pid)
;
/* Do some work after receiving SIGCHLD */
printf(".");
}
exit(0);
}
这里的 while (!pid) ; 浪费资源。可以将 ; 换成 pause(); 。这里不能去除循环,因为 pause() 可能被SIGINT等中断。但是,如果SIGCHLD在 while 之后、 pause() 之前到达,会导致父进程一��直处在 pause() 中。
用 sleep(1) 替换 pause() 会解决竞争问题,但是如果信号在 while 和 sleep 之间到达,程序必须等待 sleep 时间结束才能继续。使用其它睡眠函数也没有意义。睡眠时间太短会导致循环浪费资源,太长会导致程序太慢。
可以用 signalsuspend 函数来处理自旋循环。
int signalsuspend(const sigset_t *mask);
这个函数相当于
sigprocmask(SIG_SETMASK, &mask, &prev);
pause();
sigprocmask(SIG_SETMASK, &prev, NULL);
但保证前两行同时发生,不会被中断。具体来说,这个函数暂时改变当前被阻塞的信号集,等待信号发生。如果信号发生后的动作是终止,就立即终止,否则在handler返回后返回,并恢复调用时的阻塞集状态。将 pause() 或 sleep(1) 改为 signalsuspend(&prev) 就能解决自旋循环的问题。